The first Emotron softstarter was launched in 1983. In 1999, we introduced the torque control technique to the market, offering further reduced mechanical and hydraulic stress as well as constant acceleration and deceleration rates.
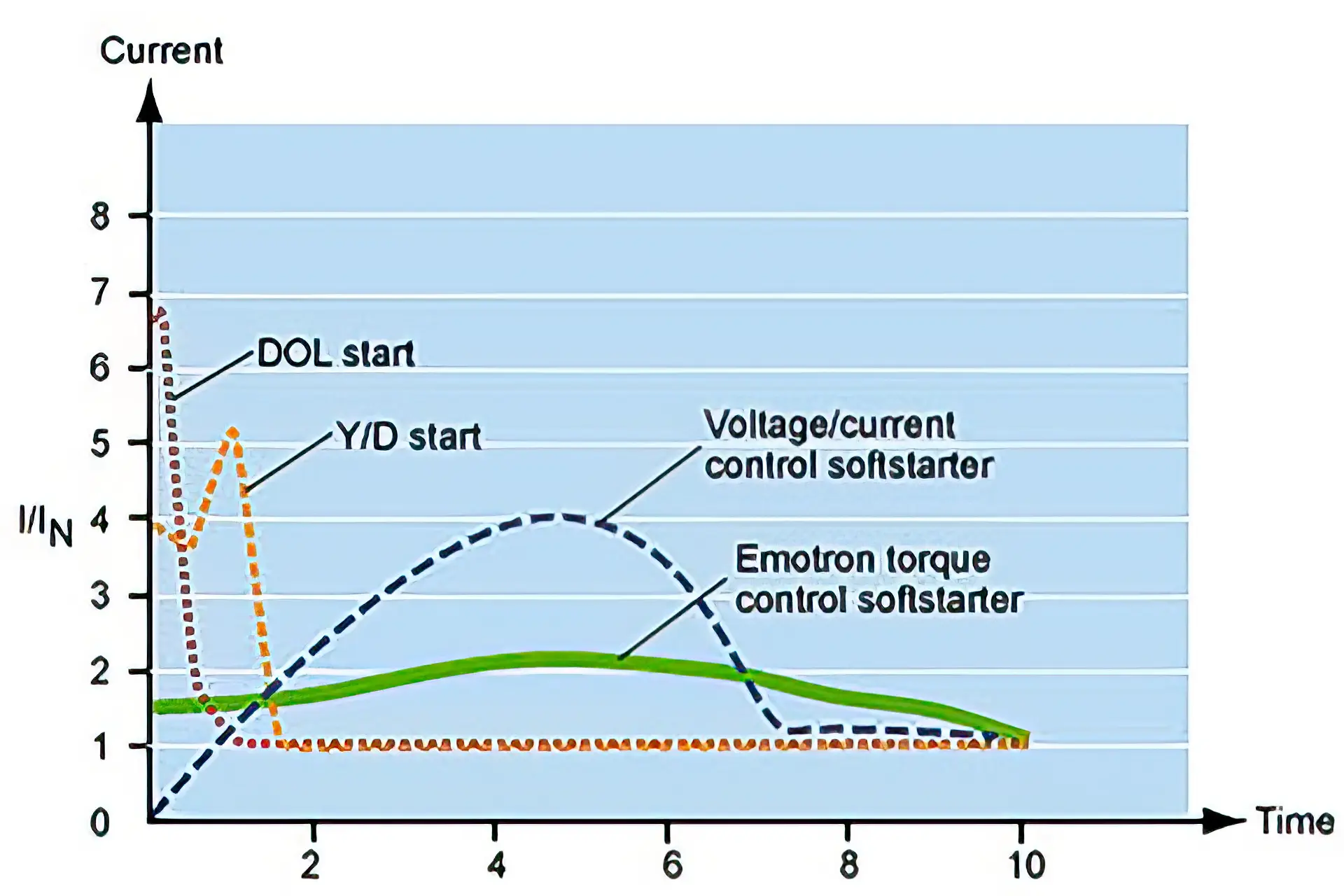
The torque control reduces start currents by up to 30% more than when using a softstarter with a pre-defined voltage ramp. This minimises mechanical stress, allowing for smaller fuses and less expensive cables. The torque control also ensures linear stops to prevent water hammer in pump applications – without costly motor-controlled valves. The deceleration ramp starts at the motor load torque point and ensures a linear ramp at all pump load.

The logic-based torque ramp technology uses a control algorithm to maintain constant acceleration and deceleration torque. Motor voltage, motor flux, current and voltage zero-crossing are used to determine the torque and power factor. The Emotron softstarter uses data to continuously calculate actual shaft torque. Torque ramps can be configured for variable or constant torque loads. Square torque control can be used for pumps and fans.
The torque controller generates a desired motor torque using the entered initial torque, end torque and torque ramp time. It then controls the thyristor firing on the basis of actual-versus-desired motor torque. The motor torque is increased according to a timed ramp and is no longer strictly dependent on an applied motor voltage or the torque/speed characteristics of the specific motor. No external motor speed feedback is required.